Notícia
Pesquisadores criam algoritmo para guiar robô em cirurgias
Código computacional possibilitará que bebês sejam operados com mais segurança e precisão
Divulgação, UFMG
Fonte
UFMG | Universidade Federal de Minas Gerais
Data
terça-feira, 22 setembro 2020 09:15
Áreas
Automação e Controle. Bioeletrônica. Bioinformática. Cirurgia. Engenharia Biomédica. Robótica.
Em cirurgias com pouca margem para intervenções, como em procedimentos no nariz, cérebro ou em bebês, os médicos precisam superar uma série de desafios para que a tarefa seja realizada com sucesso, evitando movimentos bruscos e rápidos, tremor nas mãos, além de encontrar soluções para que a visão não seja comprometida. No entanto, devido à complexidade do trabalho, os riscos ainda persistem, podendo ocorrer colisões entre os instrumentos cirúrgicos e tecidos ou órgãos do corpo humano. Para auxiliar profissionais da saúde a desempenhar esse trabalho, pesquisadores da Universidade Federal de Minas Gerais (UFMG) e da Universidade de Tóquio desenvolveram um código computacional (algoritmo) que poderá guiar robôs na execução dessas operações com mais segurança e precisão.
“Além do espaço ser restrito e a visão do médico limitada, nem sempre o profissional tem boa noção de profundidade. O que nós desenvolvemos ajuda a aumentar a segurança do procedimento porque o robô pode desviar de regiões sensíveis, mesmo que elas estejam fora do campo de visão de quem realiza o procedimento. A precisão é muito elevada, pois é possível mudar a escala da manipulação. Conseguimos, por exemplo, garantir que um movimento de 10 centímetros na mão do médico se traduza em um movimento de poucos milímetros na garra do robô, permitindo que o profissional da saúde faça procedimentos em estruturas bastante reduzidas”, explica um dos coordenadores da pesquisa, o professor Dr. Bruno Vilhena Adorno, do Departamento de Engenharia Elétrica da Escola de Engenharia e pesquisador do INCT de Sistemas Autônomos Cooperativos (InSAC), sediado no campus da USP em São Carlos.
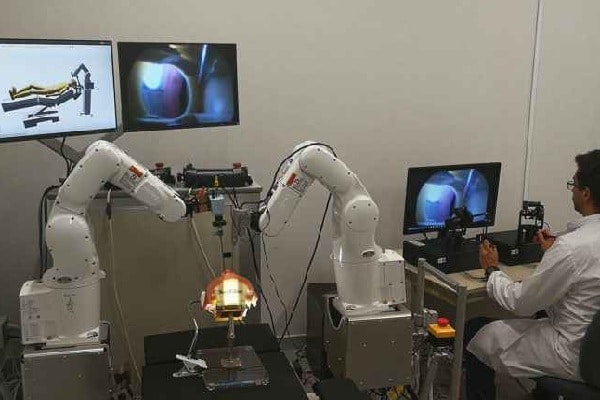
Para testar o algoritmo, diversos experimentos foram realizados nos laboratórios da universidade japonesa, onde os pesquisadores utilizaram um par de robôs equipados com ferramentas cirúrgicas para simular movimentos e incisões nas narinas de um boneco, explorando diferentes possibilidades de controle. Em uma delas, os cientistas programaram os robôs para cumprir tarefas e trajetórias totalmente autônomas. Dessa forma, eles conseguiram realizar ações sem colidirem com qualquer parte da anatomia. Também não foram registrados choques entre os robôs, mesmo quando seus caminhos se cruzavam. O Dr. Bruno Adorno ressalta, no entanto, que, para realizar o procedimento em um paciente real, outros cuidados deveriam ser tomados, como a incorporação de sensores e alguns algoritmos de percepção.
Com as ‘garras controladas’
Outro teste realizado pelos cientistas envolveu a teleoperação, procedimento no qual o médico controla as “garras” dos robôs como se fossem suas próprias mãos para realizar suturas e incisões. Nesse caso, os robôs seguiram com um sistema autônomo “ativado” para desviar de colisões. Ou seja, mesmo que o cirurgião force uma ferramenta na direção da outra, elas não se chocam, garantindo a segurança da operação. Quando isso ocorre, o médico percebe forças artificiais nos controles que segura em cada uma das mãos. Essas forças se intensificam à medida que os instrumentos se aproximam uns dos outros.
Segundo o Dr. Bruno Adorno, os resultados alcançados nos testes são promissores. “Em um dos nossos experimentos, mostramos algumas evidências de que o sistema desenvolvido pode, em princípio, ser usado em exames endoscópicos e em cirurgias que demandam intervenções por entre as costelas de bebês recém-nascidos, o que atualmente é inviável com o robô cirúrgico mais avançado existente no mercado, o Da Vinci”, afirmou o professor. De acordo com ele, algumas das técnicas desenvolvidas já poderiam ser aplicadas de imediato, enquanto outras devem ser incorporadas aos poucos nos robôs atualmente disponíveis.
O professor explicou ainda que essa área de pesquisa tem-se tornado bastante atrativa, principalmente pelo fato dos robôs modernos estarem cada mais complexos e atuando mais próximos dos seres humanos, exigindo que os algoritmos de controle tenham mais garantias de bom funcionamento.
Assista ao vídeo que mostra os experimentos realizados na Universidade de Tóquio:
Acesse a notícia completa na página da UFMG.
Fonte: UFMG e Henrique Fontes/InSAC. Imagem: Divulgação, UFMG.
Em suas publicações, o Portal Tech4Health da Rede T4H tem o único objetivo de divulgação científica, tecnológica ou de informações comerciais para disseminar conhecimento. Nenhuma publicação do Portal Tech4Health tem o objetivo de aconselhamento, diagnóstico, tratamento médico ou de substituição de qualquer profissional da área da saúde. Consulte sempre um profissional de saúde qualificado para a devida orientação, medicação ou tratamento, que seja compatível com suas necessidades específicas.
Os comentários constituem um espaço importante para a livre manifestação dos usuários, desde que cadastrados no Portal Tech4Health e que respeitem os Termos e Condições de Uso. Portanto, cada comentário é de responsabilidade exclusiva do usuário que o assina, não representando a opinião do Portal Tech4Health, que pode retirar, sem prévio aviso, comentários postados que não estejam de acordo com estas regras.





Apenas usuários cadastrados no Portal tech4health t4h podem comentar, Cadastre-se! Por favor, faça Login para comentar