Notícia
Robô com Inteligência Artificial pode encontrar objetos perdidos em um ambiente
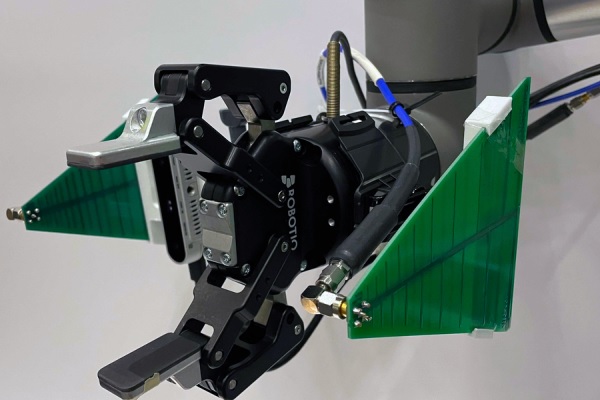
Braço robótico utiliza dados de uma câmera e antena para localizar e recuperar objetos: no futuro, poderá ajudar idosos a realizar tarefas diárias em casa
Divulgação, MIT
Fonte
MIT | Instituto de Tecnologia de Massachusetts
Data
quinta-feira, 7 outubro 2021 06:50
Áreas
Inteligência Artificial. Robótica.
Pesquisadores do Instituto de Tecnologia de Massachusetts (MIT) criaram um sistema robótico que pode encontrar objetos em meio à desordem de um ambiente. O sistema, chamado RFusion, é um braço robótico com uma câmera e uma antena de radiofrequência (RF) presa à garra. O robô utiliza os sinais da antena com a entrada visual da câmera para localizar e recuperar um item, mesmo se o item estiver escondido sob uma pilha de coisas e completamente fora de vista.
O protótipo RFusion que os pesquisadores desenvolveram depende de etiquetas RFID, que são etiquetas baratas, sem bateria, que podem ser presas a um item e refletem os sinais enviados por uma antena. Como os sinais de RF podem viajar pela maioria das superfícies (como o monte de roupa que pode estar escondendo um objeto), o RFusion é capaz de localizar um item etiquetado dentro de uma pilha.
Usando o aprendizado de máquina, o braço robótico encontra automaticamente a localização exata do objeto, move os itens em cima dele, agarra o objeto e verifica se ele pegou o item certo. A câmera, a antena, o braço robótico e a Inteligência Artificial são totalmente integrados, de modo que o RFusion pode funcionar em qualquer ambiente sem a necessidade de uma configuração especial.
Embora encontrar objetos perdidos seja útil, o RFusion pode ter muitas aplicações mais amplas no futuro, como separar pilhas para atender pedidos em um depósito, identificar e instalar componentes em uma fábrica de automóveis ou ajudar um indivíduo idoso a realizar tarefas diárias em casa, embora o protótipo atual ainda não seja rápido o suficiente para esses usos.
“Essa ideia de ser capaz de encontrar itens em um mundo caótico é um problema em aberto no qual estamos trabalhando há alguns anos. Ter robôs capazes de pesquisar coisas embaixo de uma pilha é uma necessidade crescente na indústria hoje ”, disse o Dr. Fadel Adib, autor sênior do estudo e professor associado do Departamento de Engenharia Elétrica e Computação do MIT e diretor do grupo Signal Kinetics no MIT Media Lab.
Enviando sinais
O RFusion começa a procurar um objeto usando sua antena, que reflete os sinais da etiqueta RFID para identificar uma área esférica na qual a etiqueta está localizada. Ele combina essa esfera com a entrada da câmera, o que restringe a localização do objeto. Por exemplo, o item não pode estar localizado em uma área vazia de uma mesa.
Mas, uma vez que o robô tem uma ideia geral de onde o item está, ele precisa balançar seu braço amplamente ao redor da sala, tomando medidas adicionais para chegar à localização exata, que ainda é lenta e ineficiente.
Os pesquisadores usaram o aprendizado de máquina por reforço para treinar uma rede neural que pode otimizar a trajetória do robô até o objeto. Na aprendizagem por reforço, o algoritmo é treinado por tentativa e erro com um sistema de recompensa.
“É assim também que nosso cérebro aprende. Somos recompensados por nossos professores, por nossos pais, por um jogo de computador. A mesma coisa acontece na aprendizagem por reforço. Deixamos o agente cometer erros ou fazer algo certo e então punimos ou recompensamos a rede. É assim que a rede aprende algo que é realmente difícil de modelar”, explicou a doutoranda Tara Boroushaki, autora principal do estudo.
Superando a desordem
Os pesquisadores testaram o RFusion em vários ambientes diferentes. Eles esconderam um chaveiro em uma caixa cheia de bagunça e esconderam um controle remoto sob uma pilha de itens em um sofá.
Mas se eles alimentassem todos os dados da câmera e medições de RF para o algoritmo de aprendizado de reforço, isso teria sobrecarregado o sistema. Portanto, com base no método que um GPS usa para consolidar dados de satélites, eles resumiram as medições de RF e limitaram os dados visuais à área bem na frente do robô.
A abordagem funcionou bem – o RFusion teve uma taxa de sucesso de 96% ao recuperar objetos que estavam totalmente escondidos sob uma pilha.
Assista ao vídeo de apresentação do robô RFusion (em inglês):
Acesse a notícia completa na página do MIT (em inglês).
Fonte: MIT News Office. Imagem: Divulgação, MIT.
Em suas publicações, o Portal Tech4Health da Rede T4H tem o único objetivo de divulgação científica, tecnológica ou de informações comerciais para disseminar conhecimento. Nenhuma publicação do Portal Tech4Health tem o objetivo de aconselhamento, diagnóstico, tratamento médico ou de substituição de qualquer profissional da área da saúde. Consulte sempre um profissional de saúde qualificado para a devida orientação, medicação ou tratamento, que seja compatível com suas necessidades específicas.
Os comentários constituem um espaço importante para a livre manifestação dos usuários, desde que cadastrados no Portal Tech4Health e que respeitem os Termos e Condições de Uso. Portanto, cada comentário é de responsabilidade exclusiva do usuário que o assina, não representando a opinião do Portal Tech4Health, que pode retirar, sem prévio aviso, comentários postados que não estejam de acordo com estas regras.





Apenas usuários cadastrados no Portal tech4health t4h podem comentar, Cadastre-se! Por favor, faça Login para comentar